
動歩行と先行随伴性姿勢調節
Dynamic walking
動歩行というと聞きなれない方も多いと思いますが、歩行には大きく分けて2種類あります。ひとつは動歩行、もうひとつは静歩行と言います。
そもそも歩行とは?・・・アンバランスの連続と言われています(動歩行です)。
こんな話があります。二足歩行ロボットの研究者たちはロボットが倒れないように、一歩一歩を安定させながら移動するプログラムをつくり頑張りましたが、いくらやっても倒れてしまいました。
あるとき、研究者が閃きました。「倒れるとインプットしたら?」
転倒することなく歩けてしまったのです。
これは倒れるという動作の後に反対側の足を出すというプログラムの連続なのです。
人間には、もともと先行随伴性姿勢調節という機能があます。倒れそうになると倒れまいとして足が出るというメカニズムです。

ここに人形があるとします。人形は手を下した状態で立っています。手を前に倣えの形にしたらどうでしょう?多分、バランスを崩して倒れてしまいます。
では人間が同じことをしたらどうでしょう?倒れることはありませんね。これが先行随伴性姿勢調節機能です。
先行随伴性姿勢調節は予測的姿勢調節とも言われます。少し簡単に表現すると先回りシステムでしょうか。
10キロの荷物を持ち上げようとすると、体はそれに対応しようと準備し実践するのと同じです。
二足歩行は動歩行
Bipedal walking
原則、動歩行は二軸歩行で実現します。
人間の場合、体の重心はおへその少し下あたりにあります。丹田と言われるところです。
もうひとつは足(足首から下)にかかる圧力ポイントがあります。
体の重心をCOG、足の圧力中心点をCOPと言います。
二軸歩行はCOGとCOPが重なることがほとんどなく、COPはCOGを挟んだ状態である一定のズレをつくりながら歩きます。
この状態で動歩行は実現します。イメージとしてはHONDAのアシモくんがスタスタ歩いている感じ。
もう一つの静歩行とは、COGとCOPが、一本線の上を移動する感じです。イメージとしては、体操初心者が平均台の上を進む状態です。一歩一歩、重心を確認しながら、フラフラしながら歩く状態です。
人間は基本、動歩行なのです。
動歩行の実現
Insole
足の機能がインソールで改善されることで動歩行が実現します。
スーパーフィートカスタムインソールのところで説明しましたが復習も含めてもう一度説明します。
足は衝撃を吸収したり、逆に衝撃に対し反発したりします。動歩行はアンバランス歩行です(倒れる動作の連続)。したがって、足がグニャグニャの状態では、本来の機能が発揮できません。
少しオーバーなイメージですが、フワフワのマットの上で重量挙げをしているようなものです。
すべての人が足の骨格にズレが生じているわけではありませんが、すべての人は足の骨格がズレる可能性があります。
このリスクを回避するためにニュートラルタイプのスーパーフィートプレミアムインソールが最適です。
動歩行の訓練
ノルディックウォーキングが動歩行の訓練になります。
ノルディックウォーキングは、COGとCOPが重なることを防止します。これにより安定感のある動歩行が実現します。
また、ノルディックウォーキングポールを使うことで、上半身の筋肉も使うのと同時に理想的な全身運動も実現します。

動歩行はアンバランス歩行ですが、ポールを使用することでアンバランスのリスクを排除します。
ノルディックウォーキングは、もともとノルディックスキーの夏季トレーニングです。スポーツなのです。
ノルディックウォーキングによる全身運動を、無理のない負荷で実践することで、筋肉がバランスよく稼働し血流やリンパ循環を促進することが期待できます。
また、骨盤が正しい位置をキープしようとすることで姿勢改善にもなり、腰痛や肩こりが改善されることも多く報告されています。
当店ではノルディックウォーキング体験会も不定期ですが実施しております。また、店頭体験も実施しておりますのでお気軽にご来店ください。
正しい歩行姿勢のポイントはかかと
 足は体の基礎とお話をしてきましたが、足の基礎は、踵(かかと)です。
足は体の基礎とお話をしてきましたが、足の基礎は、踵(かかと)です。
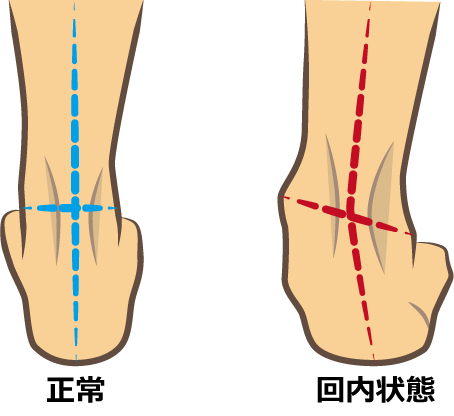
外反母趾や偏平足の方のかかとは内側に倒れこんでいます。これを回内と言います。
症状が悪化した状態を過剰回内といいます。過剰回内になると膝や股関節に負担がかかります。
自分の踵は?
アキレス腱から踵の先端までマジックで線を引きます。
立ち上がった状態で真っ直ぐであればOKです。
踵が正しい位置に戻ると驚くほど歩きやすくなります。
対策は?
足に合ったサイズの踵のしっかりした靴を履く。
インソールで踵をしっかりとホールドする。
スーパフィートカスタムインソールは、可能な限り踵を正常な位置に導きます。

